To use the components on the Explorer board, Pimoroni has created a custom UF2 file, including the required drivers. As of 03/01/2022 the latest version of the Pimoroni firmware (0.3.2) does not work, use version 0.3.1. This might not be the case for other boards.
Use the Update Firmware option on Thonny to return to a vanilla flavour and the Blink example if the current Pimoroni version does not work as expected. Select an earlier version of the UF2 and try again.
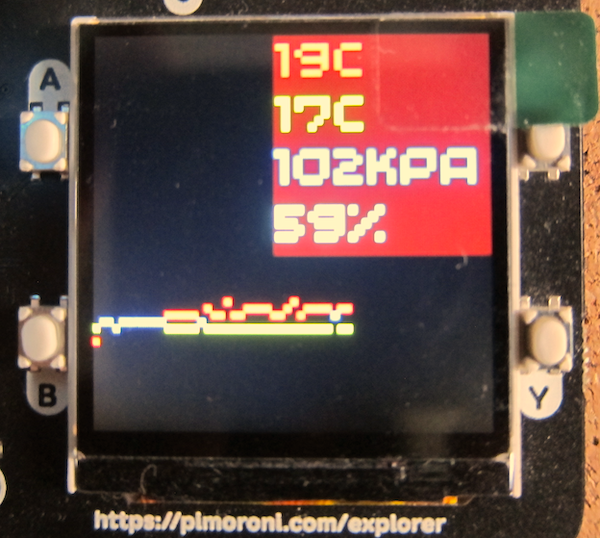
There is an example that measures the cpu temperature which is then displayed as text and a bar graph.
The next stage was to make use of the Breakout Garden sockets and add some breakout units.
Do check the indenting as Python uses the indenting to define the structure of the program.
import machine
import utime
from breakout_bme68x import BreakoutBME68X
from pimoroni_i2c import PimoroniI2C
PINS_BREAKOUT_GARDEN = {"sda": 4, "scl": 5}
PINS_PICO_EXPLORER = {"sda": 20, "scl": 21}
i2c = PimoroniI2C(**PINS_PICO_EXPLORER)
# Pico Explorer boilerplate
import picoexplorer as display
width = display.get_width()
height = display.get_height()
display_buffer = bytearray(width * height * 2)
display.init(display_buffer)
# BME68x configuration
bme = BreakoutBME68X(i2c)
#bme.configure(FILTER_COEFF_3, STANDBY_TIME_1000_MS, OVERSAMPLING_16X, OVERSAMPLING_2X, OVERSAMPLING_1X)
# reads from Pico's temp sensor and converts it into a more manageable number
sensor_temp = machine.ADC(4)
conversion_factor = 3.3 / (65535)
# Set up text areas
blockHeight = 33
textBlocks = 8
textArea=list()
for x in range(textBlocks):
if(textBlocks>4):
if(x<4):
textArea.append([10,(blockHeight*x)+1,120,blockHeight])
else:
textArea.append([120,(blockHeight*(x-4))+1,120,blockHeight])
else:
textArea.append([120,(blockHeight*x)+1,120,blockHeight])
# Set up background and text pens
background_pen = display.create_pen(0,0,0)
cpu_temp_pen = display.create_pen(255, 64, 64)
bme_temp_pen = display.create_pen(64, 255, 64)
pressure_pen = display.create_pen(64, 64, 255)
humidity_pen = display.create_pen(0, 255, 255)
# Define number of pixels for the graph points
graph_element_size = 1
graph_y_scale = 4
def drawTemp(i,cpu_temp,sensor_temp):
diff = abs((cpu_temp*graph_element_size)-(sensor_temp*graph_element_size))
if(diff<graph_element_size):
display.set_pen(255,255,0)
display.rectangle(i, height - (cpu_temp * graph_y_scale), graph_element_size,graph_element_size)
else:
display.set_pen(cpu_temp_pen)
display.rectangle(i, height - (cpu_temp * graph_y_scale), graph_element_size,graph_element_size)
display.set_pen(bme_temp_pen)
display.rectangle(i, height - (int(sensor_temp) * graph_y_scale), graph_element_size,graph_element_size)
def writeInBlock(text, location, pen, paper, size):
# Draw background to clear display area
display.set_pen(paper)
display.rectangle(location[0],location[1],location[2],location[3])
# Write text in location one pixel left and down
display.set_pen(pen)
display.text(text, location[0]+1,location[1]+1,100,size)
# Initialise run variables
i = 0
count = 0
max_temp = 0
min_temp = 100
while True:
# the following two lines do some maths to convert the number from the temp sensor into celsius
reading = sensor_temp.read_u16() * conversion_factor
temperature = round(27 - (reading - 0.706) / 0.001721)
bmetemp, pressure, humidity, gas_resistance, status, gas_index, meas_index = bme.read()
max_temp=max(max_temp,bmetemp)
min_temp=min(min_temp,bmetemp)
# Clear the display and reset counter if the graph reaches the right hand side
if i >= (width + 1):
i = 0
display.set_pen(0, 0, 0)
display.clear()
# Draw graph element
drawTemp(i,temperature,bmetemp)
writeInBlock("{:.0f}".format(temperature) + "c", textArea[0],cpu_temp_pen,background_pen,4)
writeInBlock("{:.0f}".format(bmetemp) + "c", textArea[1],bme_temp_pen,background_pen,4)
writeInBlock("{:.0f}".format(pressure/1000) + "kPa", textArea[2],pressure_pen,background_pen,3)
writeInBlock("{:.0f}".format(humidity)+"%", textArea[3],humidity_pen,background_pen,4)
writeInBlock("Mx {:.0f}".format(max_temp) + "c", textArea[4],bme_temp_pen,background_pen,3)
writeInBlock("Mn {:.0f}".format(min_temp) + "c", textArea[5],bme_temp_pen,background_pen,3)
# time to update the display
display.update()
# waits for 5 seconds
utime.sleep(1)
# Set next graph element location
i+=graph_element_size